本文作者:
两会新词:具身智能
3月5日上午,十四届全国人大三次会议在人民大会堂开幕,国务院总理李强作《政府工作报告》提到,建立未来产业投入增长机制,培育生物制造、量子科技、具身智能、6G等未来产业。目前,北京、上海、广东等十余个省市均出台了支持具身智能/人形机器人产业发展的具体政策。
具身智能是什么?
具身智能(Embodied Intelligence)是人工智能与机器人学交叉的前沿领域,强调智能体通过身体与环境的动态交互实现自主学习和进化,其核心在于将感知、行动与认知深度融合。
1950年,在图灵的论文《Computing Machinery and Intelligence》中首次提出。1986年,布鲁克斯从控制论角度出发,提出行为式机器人概念,认为智能是具身化和情境化的。1991年,布鲁克斯提出“行为智能”。2023年6月,第七届世界智能大会智能科技展,人形机器人的逐步完善为具身智能的落地提供了方向。 2024年3月,OpenAI与Figure公司合作推出了Figure 01人形机器人; 8月,中科源码服务机器人研究院发布了全国首个“温江造”基于物流场景的具身智能机器人; 10月,具身小脑模型被列入人工智能十大前沿技术趋势之一。25年春节期间爆火的杭州六小龙之宇树科技。再到本月《2025年国务院政府工作报告》提到,要培育具身智能等未来产业。
国内外具身智能的发展
国内发展:
技术:2023年起,中国具身智能进入“GPT时刻”,创业公司如智平方、傅利叶、星动纪元等密集融资。产业:车企(比亚迪、小鹏、广汽)加速布局人形机器人,特斯拉Optimus推动技术标准化;蚂蚁集团、科大讯飞探索金融与语音交互场景应用。政策:信通院发布《具身智能发展报告(2024)》,提出“一脑多形”“一机多用”的发展方向
国际动态:
美国以特斯拉、波士顿动力为代表,聚焦人形机器人全栈自研;欧洲的机器人巨头(优傲、库卡、ABB)则注重工业协作机器人。此外人形机器人厂商拓展工业领域:如优必选、宇树科技成立工业机器人子公司,复用运动控制与AI算法技术,探索人形机器人在汽车装配、精密制造等场景的降本增效潜力工业协作机器人领域呈现“国产崛起”与“技术融合”两大趋势。国内企业(如越疆、节卡)通过性价比与场景定制化抢占市场,国际巨头(如优傲、ABB)则深耕高端制造与AI赋能。未来,随着柔性制造需求增长与AI大模型融合,协作机器人将进一步向高精度、智能化方向演进。
资本热度:
去年年底花旗集团全球洞察分析团队在公开表态称,到2050年,全球人形机器人市场规模将达7万亿美元,全球人形机器人数量将达到6.48亿台,约达到当前全球汽车保有量的一半。中金公司认为,具身智能未来有望在各行各业中落地,发展前景广阔。此外内地资本券商例如银河证券、国金证券、国泰君安、中信建投、国投证券也在积极探索AI技术的应用,在AI领域的布局和投资活动表明了他们对这一领域的重视和投入。未来,随着具身智能市场的进一步发展,可能会有更多的投行和券商设立专门的具身智能投资组。
前景与方向
前景展望
具身智能将人工智能与物理世界深度融合,让机器人等人工智能体能够通过传感器感知环境,并以执行器对环境施加影响。这种让 AI “长出身体”的理念,被视为迈向通用人工智能(AGI)的重要路径。具身智能系统可以在连续的感知-认知-行动回路中学习,与环境动态交互,从而弥合计算智能与现实世界的鸿沟。这意味着未来的 AI 有望不再局限于虚拟环境,而是能真正理解并操作物理世界,为各行业带来变革性影响。
未来技术突破点
大模型与三要素集成:构建大规模整合“感知-认知-行为”的模型(PCB模型),将视觉、听觉、触觉等多模态感知与高层认知决策和低层运动控制融为一体,提升机器人应对复杂未知环境的通用性和鲁棒性。例如,Google DeepMind 的 Gemini Robotics 模型赋予机器人多模态理解与推理能力,并能安全地对现实世界做出动作,推动通用机器人发展。
物理智能与形态智能:机器人需要对物理世界有深入理解并巧妙利用自身形态,通过优化身体结构(如关节布局、柔性材质)和控制策略的联合进化,提升适应性和灵活性,典型例子包括软体机器人。
高效仿真与安全策略:利用高保真度的模拟环境进行训练,确保虚拟技能能够可靠迁移到现实应用。同时,机器人行为的安全性和伦理约束也日益重要,需在技术上嵌入伦理规则与自我监督机制。
研究方向
当前,学术界和工业界在具身智能领域展开了多层次的研究探索,主要热门课题包括但不限于以下几个方向:
多模态感知与环境理解:通过融合视觉、语音、触觉等多模态感知技术,赋予机器人对环境的全面理解能力。例如,在一个房间里,机器人需要同时利用视觉识别物体、通过深度传感确定距离,必要时结合触觉探测物体质地,以形成对环境的完整认知。
强化学习与自主控制:利用深度强化学习等方法训练机器人自主决策,解决复杂控制任务(如精细操作、自主导航)。世界模型也被用于辅助决策过程,提高规划与控制的效率。
智能交互与人机对话:开发自然语言处理与机器人技术相结合的系统,让机器人能够理解人类语言指令并做出相应反应,实现自然、高效的人机互动。
仿真训练与现实迁移:构建逼真模拟环境,研究优化数据采集,如何通过域随机化、对抗训练、元学习等技术,确保机器人在虚拟训练中学到的技能能够顺利迁移到现实环境。
视觉语言动作模型(VLA):视觉语言动作(VLA)模型是一种新兴研究范式,将视觉、语言和动作融合在统一框架中,使机器人能够根据视觉与语言指令进行行动规划和决策。这种方法有效地增强了机器人在未知环境中的任务泛化能力,有望显著提高机器人处理复杂任务的效率。
具身智能相关实验室
西湖大学机器智能实验室(MiLAB)
研究方向:深度强化学习与足式机器人通用行为智能,覆盖教育、电力、服务等行业场景。
产业化路径:孵化西湖机器人科技公司,研发具备环境适应能力的智能机器人。
华为具身智能创新Lab
研究方向:具身世界重建、数据合成、自主决策平台,推动低门槛具身Agent开发。
合作生态:联合西北工业大学、香港大学等高校,与乐聚机器人、兆威机电等企业合作产业链升级
斯坦福机器人与具身智能实验室(REAL)
研究方向:机器人自主学习、人机交互、物理世界任务执行。
代表成果:提出Diffusion Guided Control框架,优化机器人在动态环境中的动作生成。
负责人:Shuran Song(香港科技大学背景)。
麻省理工学院CSAIL实验室
研究方向:智能交通、机器人感知与运动控制、具身AI理论。
产业化孵化:创始人Daniela Rus创办多家AI公司(如Liquid AI),实验室成果涵盖自动驾驶与强化学习应用。
DeepMind Robotics
研究方向:基于强化学习的机器人自主决策,推动通用智能体开发。
技术突破:通过仿真训练与迁移学习解决机械臂抓取、双足平衡等难题。
OpenDriveLab(香港大学 & 上海人工智能实验室)
研究方向:端到端自动驾驶、具身智能、机器人闭环视觉运动控制、多智能体行为拓扑等。
成果:开发了CLOVER逆动力学模型框架,提升自动驾驶鲁棒性;提出DriveLM等融合语言能力的自动驾驶模型。
Multimedia Lab (MMLab)(香港中文大学)
研究方向:多模态人工智能、具身智能的3D感知与定位。
成果:提出ReGround3D方法解决3D环境下的目标定位问题,显著优于GPT-4V等模型。
香港大学机械工程系机器人实验室
研究方向:软体机器人、仿生机器人、高性能柔性连续体机器人系统,应用于微创手术和救援任务。
香港中文大学机器人与人工智能实验室
研究方向:航天机器人、工业机器人、服务机器人、特种机器人、医疗机器人、智能汽车机器人等多个领域,已成功研制30多个机器人和智能系统,研究成果世界领先且具有广阔的应用前景。
深圳市人工智能与机器人研究院
依托:深圳市政府与香港中文大学(深圳),联合多个世界顶级研究机构建立的十大基础研究机构之一。
研究方向:群体智能、特种机器人、智能机器人、医疗机器人、智能控制、微纳机器人、具身智能、通用机器人、多智能体协作、软体机器人等。
香港科技大学Cheng Kar-Shun Robotics Institute (CKSRI)
研究方向:自主飞行(如无人机技术)、海洋机器人、智能建造、智能制造、人形机器人、视觉智能、机器人操作、柔性电子、软体机器人、智能传感器、微型机器人系统以及自动驾驶等多个领域。
香港科技大学机器人研究所
研究方向:移动机器人、无人机、智能制造、机器人感知与控制、医疗机器人等。
下分实验室
郑家纯机械人研究所(CKSRI)
香港科技大学-Bright Dream Robotics 联合研究院
香港科技大学协同创新中心
香港科技大学-DJI 联合创新实验室
香港科技大学-生产力局工业人工智能及机械人技术联合实验室
香港科技大学-华为联合实验室
香港科技大学-小一机器学习与认知推理联合实验室
香港建筑机械人研究中心
智能自动驾驶中心(IADC)
香港理工大学具身智能实验室
合作方:济南伯宇珅航、金安智能科技。
研究方向:结合大语言模型的垂直领域调优技术,提升机器人操作性能与任务决策能力。
香港城市大学机器人与自动化研究中心
研究方向:基于传感器的规划/控制、智能机器人运动、长期任务、医疗和手术机器人、自主操作、集体灵巧性、任务划分、编队与共识、理论基础、多机器人系统、软物体操作、视觉形状伺服、形态模型、潜在形状表示、反馈形状控制、多模态传感器融合、人机接口、医疗机器人感知、计算传感器模型、机器人感知。
NUS AI LAB
隶属:新加坡国立大学。
研究方向:建模与表示、推理与规划、机器学习与数据科学、计算机视觉和自然语言处理以及学习理论。具体涉及具身AI(如移动机器人、自动驾驶车辆等领域)、交互式AI(开发用于改善人机交互的方法和系统)以及可信AI(考虑AI系统部署的伦理、法律和社会影响)。
Advanced Robotics Centre - NUS
隶属:新加坡国立大学。
研究方向:智能抓取技术相关(如软机器人智能抓取器)、机器人技术的发展历程及应用场景研究。
Synteraction Lab
成立:由Shengdong Zhao博士于2009年成立。
愿景:通过可穿戴平台和多模式交互方法改变我们与技术交互的方式。
研究方向:开发新的界面工具和应用,发表人机交互领域的顶级会议和期刊文章。
Microsystem Engineering and Robotics
实验室负责人:Peter C.Y.Chen。
研究方向:微系统和机器人技术的研究与开发,从微观到宏观尺度的物理和生物系统进行机械操作,以产生实用的工程解决方案。积极寻求合作,欢迎对微系统工程和机器人技术感兴趣的学生。
Multimodal AI and Robotic Systems (MARS) Lab
隶属:南洋理工大学。
研究方向:物理人工智能,重点关注人工智能如何使机器人、物联网和工业系统等物理系统感知、理解并与物理世界交互,涉及多模态感知、具身人工智能、AIoT系统等多个方面。
Perception and Embodied Intelligence (PINE) Lab
隶属:南洋理工大学。
研究方向:具身指令跟随、通用机器人操作的生成式模型、通用机器人包装系统、基础模型压缩、实时在线3D场景感知。
S-Lab for Advanced Intelligence
成立时间:2020年。
隶属:南洋理工大学。
研究方向:计算机视觉、自然语言处理、强化学习、深度学习和分布式计算等前沿AI技术。具体涉及深度学习中的内容编辑和生成、分布式学习、超分辨率、图像和视频理解、媒体取证、自然语言处理以及3D场景理解等。
MMLab@NTU
隶属:南洋理工大学。
研究方向:低级别视觉、图像和视频理解、创意内容创作、3D场景理解与重建等。涉及超分辨率、内容编辑与创作、图像和视频理解、3D生成式AI、深度学习、媒体取证等多个领域。
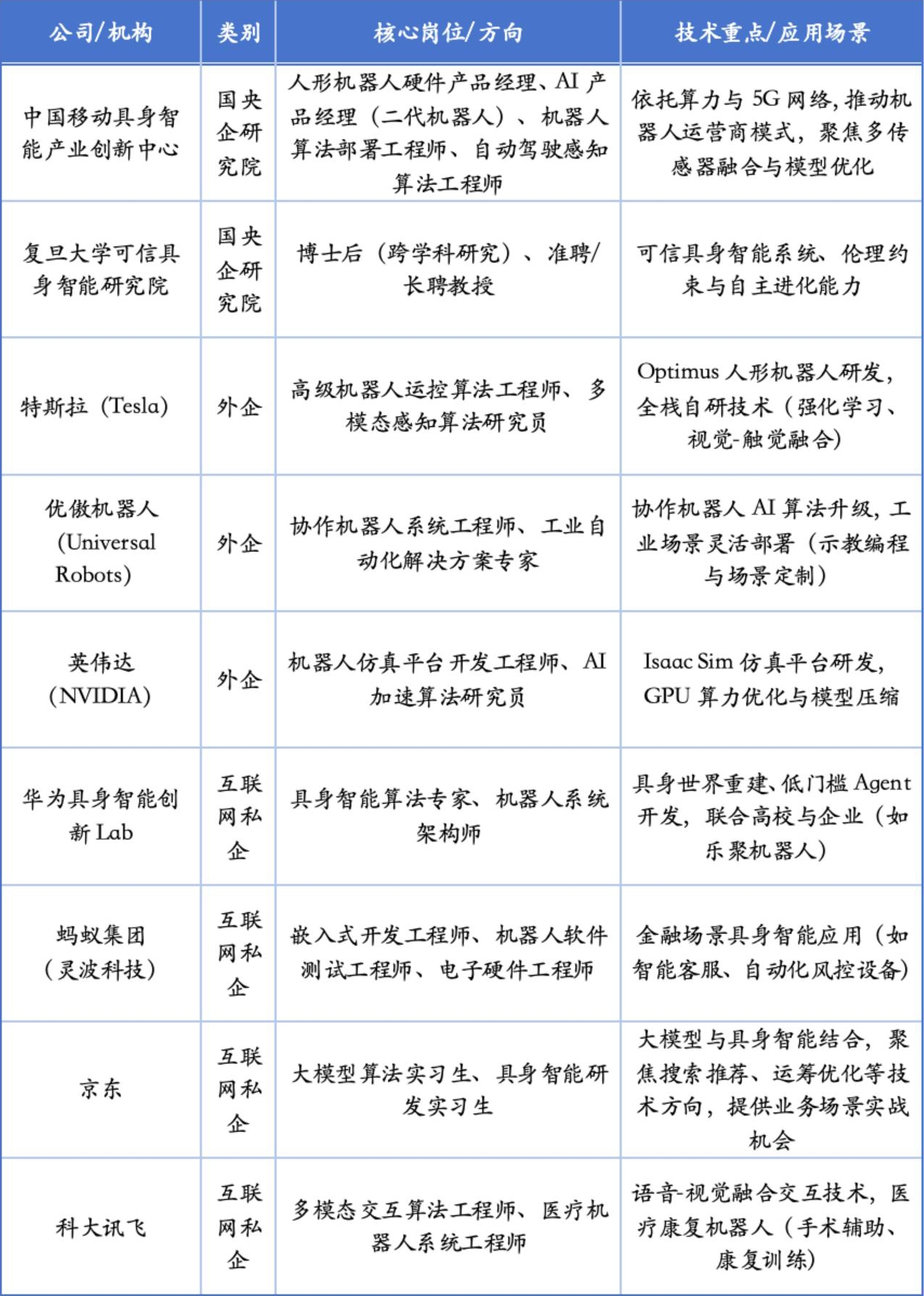
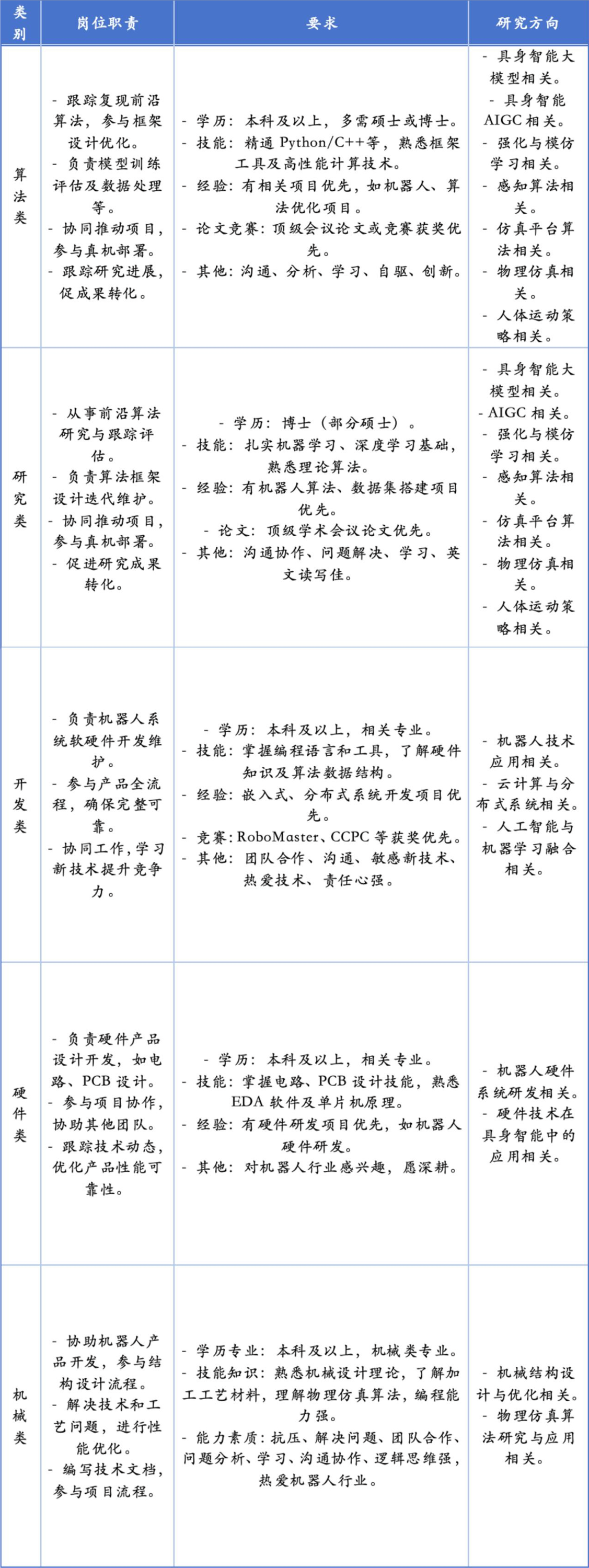
就业方向
推荐专业
![]() 宾夕法尼亚大学机器人学硕士 University of Pennsylvania
宾夕法尼亚大学机器人学硕士 University of Pennsylvania ![]()
宾大的ROBO硕士项目由全球顶尖的机器人研究中心之一——GRASP实验室设立和管理,教授学生机器人学、视觉、感知、控制、自动化和机器学习方面的科学与技术。同时提供thesis选项
![]() 剑桥大学机器学习与机器智能哲学硕士 University of Cambridge
剑桥大学机器学习与机器智能哲学硕士 University of Cambridge ![]()
旨在教授机器学习和机器智能的最新技术;为学生提供在行业中担任领导角色所需的技能和专业知识;并为学生提供博士研究所需的研究技能。
![]() 新加坡国立大学机器人学理学硕士 National University of Singapore
新加坡国立大学机器人学理学硕士 National University of Singapore ![]()
旨在为学生提供机器人学的基础知识,为他们在未来机器人领域、工业4.0及其他领域取得成功提供必要的深度和广度的专业知识,此外学生将有机会在特殊学期或常规学期期间通过课程[ME5888R Robotics Internship]进行可选的工业实习。这使学生能够从大学和行业中学习,以提高就业能力。
![]() 香港中文大学人工智能与机器人理学硕士(CUHK-Shenzhen) The Chinese University of Hong Kong
香港中文大学人工智能与机器人理学硕士(CUHK-Shenzhen) The Chinese University of Hong Kong ![]()
本项目依托港中大(深圳)数据科学学院、理工学院及深圳市人工智能与机器人研究院的优秀师资和科研力量,旨在培养人工智能与机器人领域的尖端人才。
END
对具身智能感兴趣的同学,尤其是期待自己参与到真正的科研实战中的同学,欢迎扫码领取指南者Python基础课,仅限前10名同学哦!