登录遇到问题
Q:长时间接收不到验证码怎么办?
A:您可以拨打我们的客服热线400-183-1832进行语音辅助
没找到相关问题?点此联系客服
指南者留学全国统一咨询热线:400-183-1832,全国各地区、各分公司联系方式均为此号码。
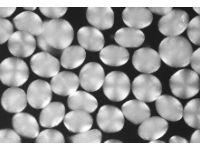
受人类手指的启发,麻省理工学院的研究人员开发出了一种机器人手,它可以在抓取物体一次后,使用高分辨率的触觉来准确识别物体。
许多机械手将所有强大的传感器都装在指尖上,因此物体必须与指尖完全接触才能被识别,这可能需要多次抓握。其他设计使用低分辨率传感器,传感器分布在整个手指上,但这些传感器捕捉不到太多细节,因此通常需要多次重拾。
相反,麻省理工学院的团队制造了一个机器人手指,其刚性骨架包裹在柔软的外层,在其透明的“皮肤”下集成了多个高分辨率传感器。这些传感器使用相机和LED来收集物体形状的视觉信息,沿手指的整个长度提供连续传感。每个手指同时捕捉对象多个部分的丰富数据。
利用这种设计,研究人员构建了一个三指机器人手,它可以在一次抓取后识别物体,准确率约为85%。僵硬的骨架使手指足够强壮,可以拿起重物,如钻头,而柔软的皮肤使他们能够牢牢抓住柔软的物品,如空塑料水瓶,而不会压碎它。
这些柔软的手指在设计用于与老年人互动的机器人中特别有用。机器人可以用帮助个人洗澡的同一只手从架子上举起重物。
“无论从哪方面来说,既有软元素又有硬元素都非常重要,但能够在很大的范围内执行出色的传感也很重要,特别是如果我们想考虑执行非常复杂的操作任务,比如我们自己的手可以执行的操作。机械工程研究生桑德拉·刘(Sandra Liu)是一篇关于机器人手指的研究论文的合著者,她说:“我们这项工作的目标是将所有使我们的人手如此优秀的东西组合成一个机器人手指,可以完成其他机器人手指目前无法完成的任务。”。
刘写了纸张与联合首席作者、机械工程本科生莱昂纳多·萨莫拉·亚涅兹(Leonardo Zamora Yañez)及其导师爱德华·阿德尔森(Edward Adelson)、大脑与认知科学系的约翰·多罗西·威尔逊(John and Dorothy Wilson)视觉科学教授以及计算机科学与人工智能实验室(CSAIL)的一名成员。这项研究将在RoboSoft会议上发表。
人性化手指
机器人手指由一个刚性的、3D绘制的内骨骼组成,内骨骼放置在一个模具中,并包裹在一个透明的硅胶“皮肤”中。在模具中制作手指无需使用紧固件或粘合剂来固定硅胶。
研究人员设计了一个弯曲形状的模具,这样机器人手指在休息时就会像人类手指一样略微弯曲。
“硅胶在弯曲时会起皱,所以我们认为,如果我们把手指塑造在这个弯曲的位置,当你把它弯曲得更大以抓住物体时,就不会产生那么多皱纹。皱纹在某些方面很好,可以帮助手指在表面上非常平滑、容易地滑动,但我们不希望出现无法出现的皱纹不能控制,”刘说。
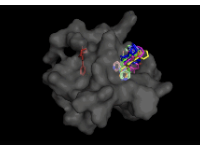
每个手指的内骨骼包含一对详细的触摸传感器,称为GelSight传感器,嵌入透明皮肤下面的顶部和中部。传感器的位置使摄像头的范围略微重叠,从而使手指能够沿着其整个长度连续感应。
GelSight传感器基于阿德尔森集团首创的技术,由一个摄像头和三个彩色LED组成。当手指抓住物体时,彩色LED从内部照亮皮肤,相机就会捕捉图像。
使用出现在软皮肤中的照明轮廓,一种算法执行反向计算,以映射抓取对象表面上的轮廓。研究人员训练了一个机器学习模型,用原始相机图像数据识别物体。
当他们微调手指制作过程时,研究人员遇到了几个障碍。
首先,随着时间的推移,硅树脂有剥落表面的倾向。刘和她的合作者发现,他们可以通过沿内骨骼关节之间的铰链添加小曲线来限制这种剥落。
当手指弯曲时,硅树脂的弯曲沿着微小的曲线分布,从而减少应力并防止剥落。他们还为关节添加了折痕,以便手指弯曲时硅胶不会被挤压得太多。
在排除设计故障时,研究人员意识到硅胶中的皱纹可以防止皮肤撕裂。
她说:“皱纹的用处是我们意外发现的。当我们在表面合成皱纹时,我们发现皱纹实际上使手指比我们预期的更耐用。”。
掌握好
一旦他们完善了设计,研究人员用两个Y型手指和一个第三个手指作为相对的拇指构建了一个机器人手。当手抓住一个物体(每个手指两个)时,它会捕捉到六个图像,并将这些图像发送给机器学习算法,该算法使用这些图像作为输入来识别物体。
因为手的触觉感应覆盖了所有手指,它可以从一次抓握中收集丰富的触觉数据。
刘说:“虽然我们的手指有很多感知功能,但增加手掌感知功能可能有助于更好地区分触觉。”。
未来,研究人员还希望改进硬件,以减少硅胶的磨损量,并增加拇指的驱动力,使其能够执行更广泛的任务。
这项工作得到了丰田研究所、海军研究办公室和SINTEF BIFROST项目的部分支持。
注:本文由院校官方新闻直译,仅供参考,不代表指南者留学态度观点。