登录遇到问题
Q:长时间接收不到验证码怎么办?
A:您可以拨打我们的客服热线400-183-1832进行语音辅助
没找到相关问题?点此联系客服
指南者留学全国统一咨询热线:400-183-1832,全国各地区、各分公司联系方式均为此号码。
制造业(在很大程度上)张开双臂欢迎人工智能。少些无聊,肮脏和危险?不用再说了。当然,机械装配的规划仍然需要绘制一些草图,这是一个复杂的难题,意味着要处理现实世界装配所需的任意3D形状和高度受限的运动。
可以理解的是,在将零件送到装配线之前,人类工程师需要跳到环中,手动设计装配计划和指令,而这种手动性质意味着高昂的人工成本和潜在的错误。
为了减轻上述负担,来自麻省理工学院计算机科学与人工智能实验室(CSAIL)、Autodesk Research和德克萨斯农工大学的研究人员提出了一种自动组装产品的方法,该方法准确、高效、可推广到各种复杂的现实世界组装。他们的算法有效地确定了多部件组装的顺序,然后为每一步搜索物理上真实的运动路径。
该团队制作了一个斯巴达级别的大规模数据集,其中包含数千个物理上有效的工业组件和运动,以测试他们的方法。所提出的方法能够解决几乎所有的问题,特别是在旋转组件上,如螺丝和拼图,其性能大大优于以前的方法。此外,它有点像一个速度恶魔,因为它可以在几分钟内解决80个部件的组装。
该论文的主要作者、麻省理工学院CSAIL博士生田云生说:“如果我们能自动找出排序和移动的方法,而不是专门为一种特定产品设计的装配线,我们就可以使用完全自适应的设置。”“也许一条装配线可以用来生产大量不同的产品。我们认为这是小批量、高混合的组装,而不是传统的大批量、低混合的组装,后者非常特定于某种产品。”
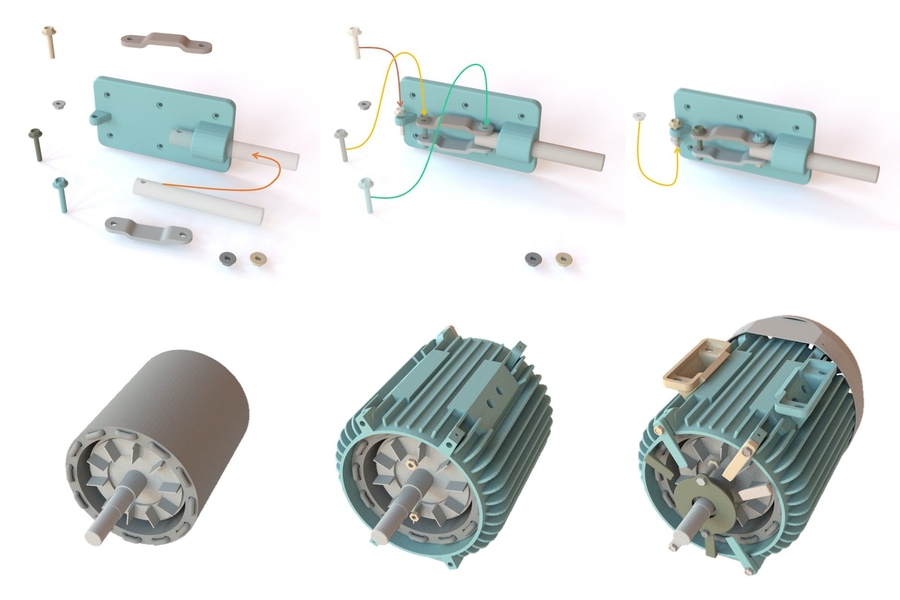
例如,给定装配一根螺杆的目标,该算法将通过拆卸和装配两个阶段来找到装配策略。拆卸规划算法寻找一条无碰撞路径将螺杆从杆上拆卸下来。该算法通过物理模拟,对螺杆施加不同的力,观察螺杆的运动。因此,沿杆的中心轴旋转的扭矩将螺钉移动到杆的末端,然后一个指向杆外的直力将螺钉和杆分开。在装配阶段,算法将拆卸路径反向,从单个部件得到装配解。
“想想宜家家具——它有一本小册子,上面有详细的说明。如今,所有这些都必须由人们手工编写,所以现在我们可以弄清楚如何制作这些组装指令,”欧特克研究公司(Autodesk research)的高级研究经理卡尔·d·d·威利斯(Karl D.D. Willis)说。“你可以想象,对于设计产品的人来说,这可能有助于建立这些类型的指令。要么是为人设计的,比如制定这些装配计划,要么是为某种机器人系统设计的。”
拆卸/组装舞蹈
在目前的制造业中,在工厂或装配线中,所有东西通常都是硬编码的。如果你想组装一个给定的产品,你必须精确地控制或编程指令来组装或拆卸一个产品。哪个零件应该先组装?下一步应该装配哪一部分?你要怎么组装这个?
以前的尝试主要局限于简单的组装路径,比如非常直接的部件转换——没有太复杂的东西。为了超越这一点,该团队使用了一个基于物理的模拟器——一种通常用于训练机器人和自动驾驶汽车的工具——来指导搜索装配路径,这使得事情变得更容易,更具有普遍性。
“假设你想从轴上拆卸一个垫圈,这是非常紧密的几何组装。目前的情况是尝试着尝试各种不同的方法去分离它们,而你很可能无法创造出一个完全无碰撞的简单路径。使用物理,你就没有这个限制了。例如,你可以试着加一个简单的向下的力,模拟器就会找到正确的动作,将洗衣机从轴上拆卸下来。”
虽然该系统可以轻松处理刚性物体,但在未来的工作中还需要规划软的、可变形的组件。
该团队正在探索的一种工作方式是制造一个物理机器人来组装物品。这将需要在机器人控制方面做更多的工作,并计划与团队的系统集成,作为朝着更广泛的目标迈出的一步:制造一条可以自适应地在没有人类的情况下组装所有东西的装配线。
“这里的长期愿景是,你如何利用自动化和机器人技术,将世界上任何物体的零件组装起来?威利斯说。“相反,我们如何将世界上任何由许多不同类型的材料组成的物体分开,以便我们可以回收并将它们放入正确的废物流中?”我们正在采取的步骤是研究如何使用一些先进的模拟来开始分离这些部件,并最终达到我们可以在现实世界中测试的地步。”
NVIDIA高级机器人研究科学家Yashraj Narang表示:“在机器人、制造和图形领域,组装一直是一个挑战。“这项工作是模拟机械装配和解决装配规划问题的重要一步。它提出了一种方法,巧妙地结合了解决计算更简单的拆卸问题,在自定义模拟器中使用基于接触丰富物理的力的动作,并使用渐进式深化搜索算法。令人印象深刻的是,该方法可以在几分钟内发现一个由50个部件组成的发动机的组装计划。在未来,看到其他研究人员和工程师在这项优秀工作的基础上继续工作,也许会让机器人在模拟中执行组装操作,然后将这些行为转移到现实世界的工业环境中,这将是令人兴奋的。”
麻省理工学院教授、CSAIL首席研究员Wojciech Matusik是这篇论文的资深作者,博士生田云生、徐洁(现在是NVIDIA的研究科学家)和李一晨也是CSAIL的作者。欧特克研究公司的研究科学家骆杰良、李辉、卡尔·d·d·威利斯以及德克萨斯农工大学计算机科学助理教授Shinjiro Sueda也参与了这篇论文。该团队将在2022年SIGGRAPH亚洲会议上展示他们的发现,论文也发表在ACM图形学报上。他们的研究部分得到了美国国家科学基金会的支持。
注:本文由院校官方新闻直译,仅供参考,不代表指南者留学态度观点。